




LIBRARY
Improved V2 Constant On-Time Control with State-Trajectory Functions
Year: 2020 | Author: Virginia Li | Paper: T4.8
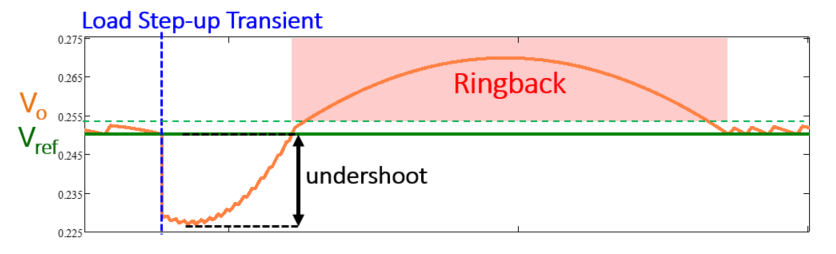
Fig. 1. Behavior V2 COT during a load step-up transient.
V2 COT control is lost when it no longer operates in the steady-state condition of output voltage (Vo) operating above the given reference voltage (Vref). During a fast and/or heavy load step-up transient, Vo can operate below Vref for a period of time, where V2 COT control is lost and an undesirable ringback occurs before control is regained, as shown in Fig. 1. In this case, a large signal analysis based on the system state-plane model is proposed to better understand the behaviors of V2 COT control.
The state-plane model contains all the necessary information describing the behavior of the system. From the state-plane model, the trajectories for the on- and off-stages of the system are derived. By plotting the state-plane trajectories in the normalized state-plane, the trajectories of each stage resemble a circle. The V2 COT control law is then mapped to the state-plane to study the behavior of the system with V2 COT control. Using the state-plane, the transient behaviors that are not observable in the time or frequency domain analysis are clearly represented.
With a better understanding of the system, a state-plane trajectory control is proposed to achieve the best transient response possible for V2 COT control. The best transient response is achieved by switching the system from on-stage to off-stage at an optimal point. Since the trajectories are circles, the optimal point can be calculated as an intersection of two circles and implemented as a current-limiting wall. The system will operate in the on-stage until its trajectory hits the wall, and the system switches to the off-stage. Afterwards, the off-stage trajectory will bring the system to the vicinity of the new steady-state to achieve the best transient, as shown in Fig. 2. The time-domain operation of the proposed state-plane control is shown in Fig. 3.
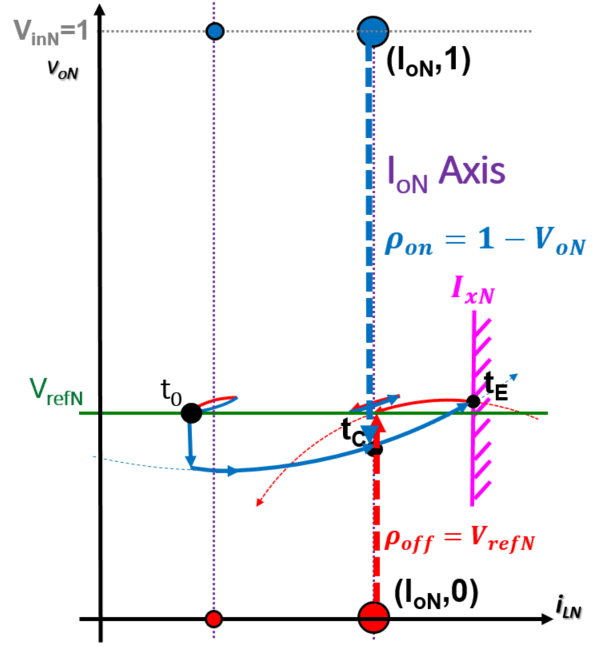
Fig. 2. Proposed state-plane trajectory control to achieve the best load step-up transient response.
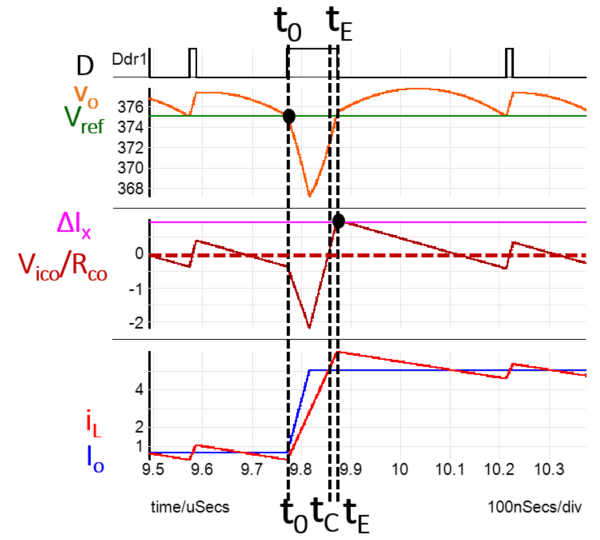
Fig. 3. Proposed state-plane trajectory control to achieve the best load
step-up transient response.
step-up transient response.
