LIBRARY
A Unified Control for the Permanent Magnet Generator and Rectifier System
Year: 2010
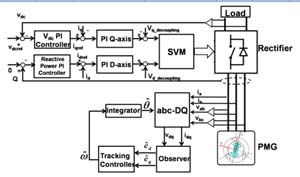
The paper proposes a unified control strategy for permanent magnet generator (PMG) and rectifier. The dynamic d-q model is used to cancel the time varying inductances and additional decoupling terms are used to minimize the damper windings' influences. A state observer and a PLL-based tracking controller provide a fast and accurate speed and rotor position estimation without sensors. With the control strategy, both the DC link voltage and generator power factor can be controlled effectively.

Fig. 1. Power stage and control circuit.
Fig. 2. Permanent magnet generator.