




LIBRARY
Non-linear, Hybrid Terminal Behavioral Modeling of a DC-based Nanogrid System
Year: 2011
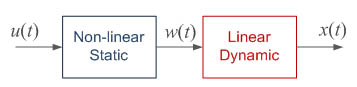
Fig. 1. Hammerstein's non-linear model.
To develop models of such systems, the procedure shown in this paper addresses non-linear terminal-behavioral modeling of the power converters in the dc-based nanogrid system by applying the Hammerstein's generic model shown in the Fig. 1, to the two-port network terminal behavioral model of the dc dc converters (Fig.2). The basic assumption here is that each non-linear power converter can be represented as a combination of non-linear static and linear dynamic structure.
After all individual static and dynamic models are obtained and built for all the components in the system, the non-linear static model of the complete system is run simultaneously in the simulation with the linear dynamic model comprised of un-terminated transfer functions. The static model has information about the system and system component's operating points, and when some disturbance (input voltage or load change) occurs, it feeds back the new operating point to the dynamic system. However, the drawback of this procedure is that transfer functions obtained to build dynamic model represent the particular converter's behavior only in the operating point at which the ac sweep was performed. In converters that feature stronger non-linearity proposed procedure models static behavior very well with no steady-state error, but fails to track transient behavior when the operating point is changed abruptly and with the large step. An improvement of the proposed procedure to overcome these problems is possible, but requires additional research focus, thus is left as a future work.
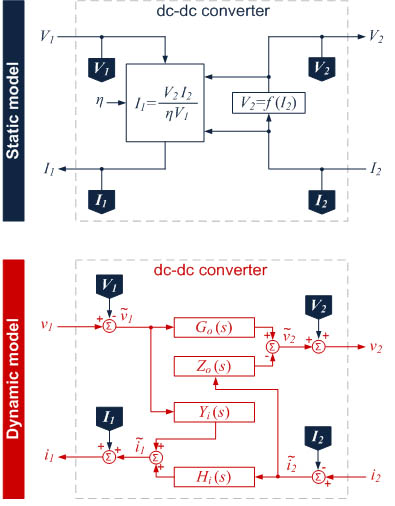
Fig. 2. Hybrid terminal behavioral model of dc-dc converters.
