




LIBRARY
State-Trajectory Control with Single-Cycle Response for POL Converters
Year: 2016
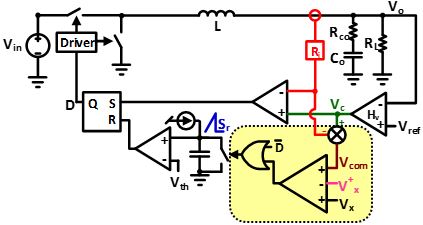
Fig. 1. COT with single-cycle transient improvement in yellow.
The fastest transient response is a single-cycle response. The proposed COT with single-cycle transient improvement is shown in detail in Fig. 1. The trajectory of the conventional COT is shown in Fig. 2 in red, and the trajectory of the proposed control is in purple. The control law of COT is given as iLRi=Vc. Assuming the compensator Hv is pure gain, K, the control law can be drawn on the trajectory as shown in Fig. 2. During steady-state, the operation of COT is always to the right of the control law. When a load step-up transient occurs at t0, the state-trajectory changes and drifts to the left of the control law at t1. For conventional COT shown in red, due to the fixed Ton, the trajectory turns off at t2 and follows a multi-cycle response until the system recovers to steady-state COT operation, to the right of the control law. For single-cycle response, when the state-trajectory drifts to the left of the control law at t1, it follows the natural trajectory until the system recovers to steady-state COT operation. Comparing the two trajectories, the trajectory control with single-cycle response (purple) has the fastest and most direct path to the new steady-state.
Experimental results for the proposed state-trajectory control with single-cycle response for COT is obtained by making external modifications to the TPS5960 evaluation board by Texas Instruments after three 470uF bulk output capacitors are removed. For single-phase operation with Vin=12V, Vref=1.2V, and using the on-board 32A dynamic load, the performance of COT with single-cycle modifications is shown in Fig. 3. After the load step-up transient is detected, COT with single-cycle is able to go from one steady-state to another steady-state much faster than the conventional COT.
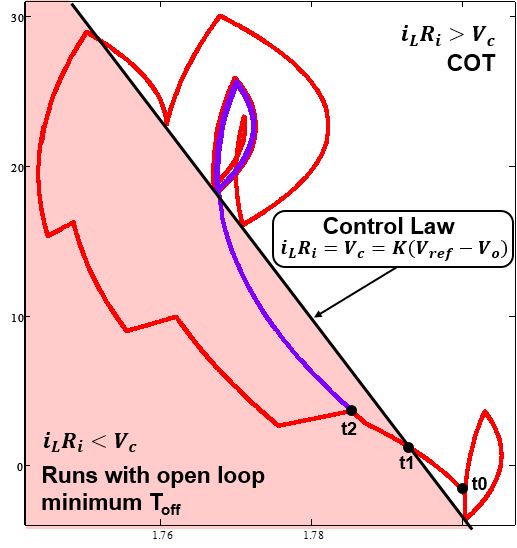
Fig. 2. Trajectory of conventional COT (red) vs Trajectory Control with Single-Cycle Response (purple).
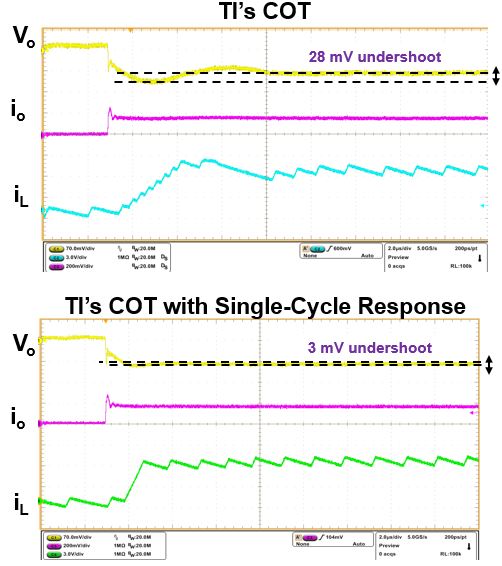
Fig. 3. Experimental results of COT with single-cycle response.
