




LIBRARY
EMI Filter Design of DC-Fed Motor-Drives Using Behavioral EMI Models
Year: 2016
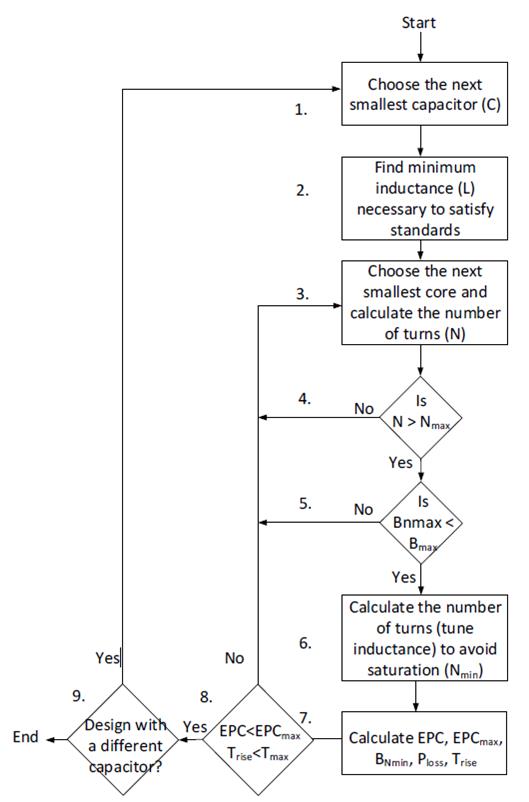
Fig. 1. General EMI filter design procedure.
The design of EMI filters is done using a search algorithm, as Fig. 1 shows, adopted to find a minimum size of EMI filter (L, C, LC, LCL, CLC etc.). From the available result options, we select the combination with the minimum weight, volume or cost, depending on which is important for the application. The procedure requires an accurate estimation of currents to size the various filter components, and thus we need accurate noise models of the motor-drive at EMI frequencies, which are explained in the papers. Fig. 2 shows how the optimized filters perform to reduce the EMI noise. Note that the method is suitable for both DM and CM EMI filter design. It is verified in the paper that, even with limited accuracy of the filter models, the proposed method should give a good first design of the EMI filters and will help in reducing the design iterations, even to the point that no iterations may be needed.
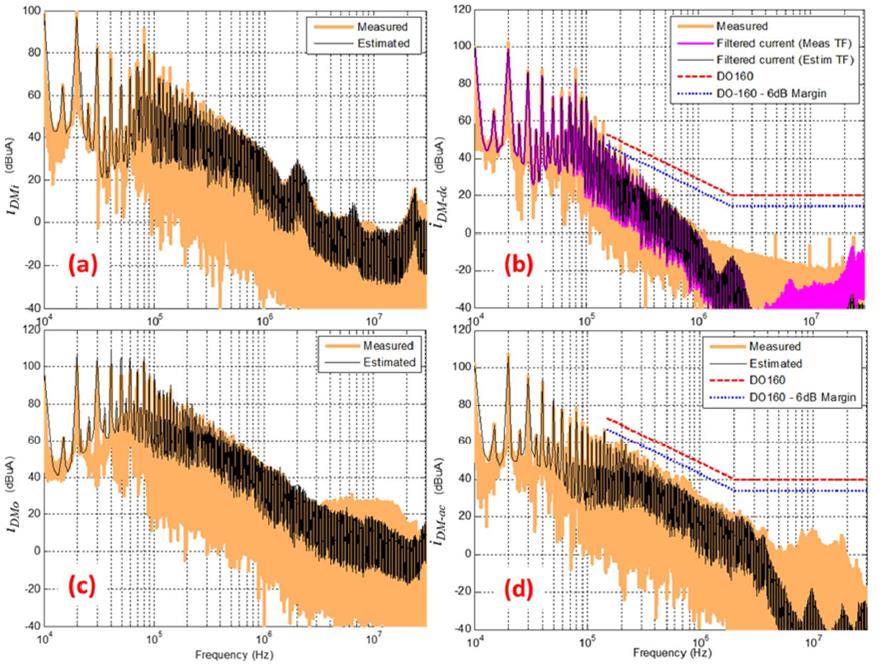
Fig. 2. DM filter performance (a) DM noise at the input-side of the drive (b) filtered input-side DM noise (c) DM noise at the output-side of the drive (d) filtered output-side DM noise.
