




LIBRARY
Control Technique for CRM-Based High Frequency Soft Switching Three-Phase Inverter Under Grid Fault Condition
Year: 2020 | Author: Gibong Son | Paper: T4.14
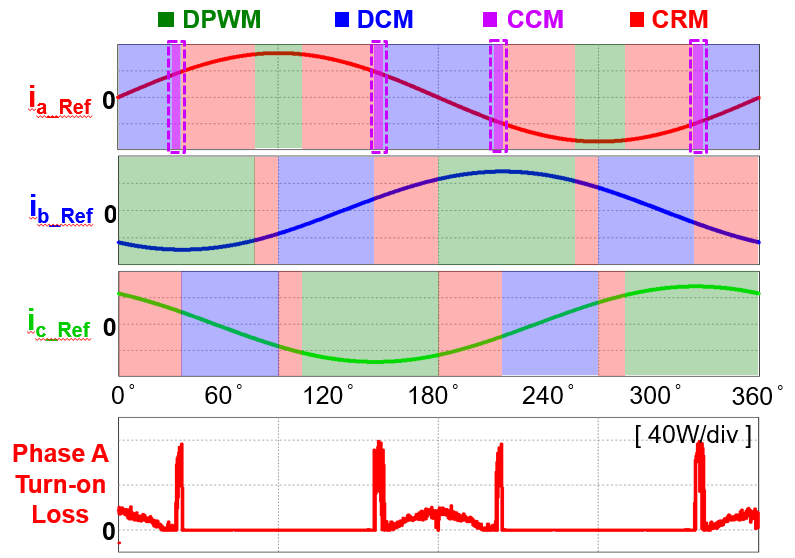
Fig. 1. Operation mode of soft-switching inverter and turn on loss distribution under Type B voltage sag.
Voltage sag is one of the most frequent grid faults. Under this condition, the magnitude of 3-phase voltage decreases, and imbal- ance appears between each phase, resulting in positive and negative sequence voltage. To avoid a large voltage ripple at the dc-link ca- pacitor, which may lead to over-voltage protection and stop inverter operation, constant active power should be delivered to the grid. For constant active power delivery, the output current to the grid becomes imbalanced.
However, if the soft-switching modulation is directly applied to the voltage sag case where the grid voltage and the output current are imbalanced, an undesired phenomenon results. As shown in Fig. 1, continuous conduction mode (CCM) operation occurs where discontinuous conduction mode (DCM) is intended. It should be noted that turn-on loss is mostly concentrated in the CCM region, creating an extremely high likelihood that hardware might fail. The rea- son for CCM operation is due to the inherent characteristics of the soft-switching modulation. The turn-on instant of the DCM phase is synchronized with the CRM phase to reduce the wide switching- frequency range. Under voltage sag conditions, because of the de- pendency of the DCM phase on the CRM phase, the V/Sec. balance at the DCM phase is violated in a specific region.
In order to prevent CCM operation and reduce the turn-on loss, pulse skipping is introduced in the DCM phase. By comparing zero current detection (ZCD) signals of the CRM phase and the DCM phase, decision making for pulse skipping is made. In this control technique, the DCM phase current has enough time to reach zero. Consequently, the concentrated turn-on loss in the CCM operation region diminishes significantly.
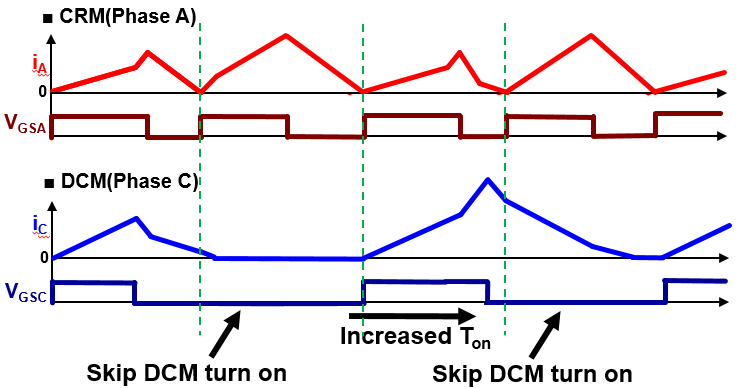
Fig. 2. Contrl Strategy under grid fault conditoin: pulse skipping in DCM phase
