




LIBRARY
Soft Start-up for High Frequency LLC Resonant Converter with Optimal Trajectory Control
Year: 2015
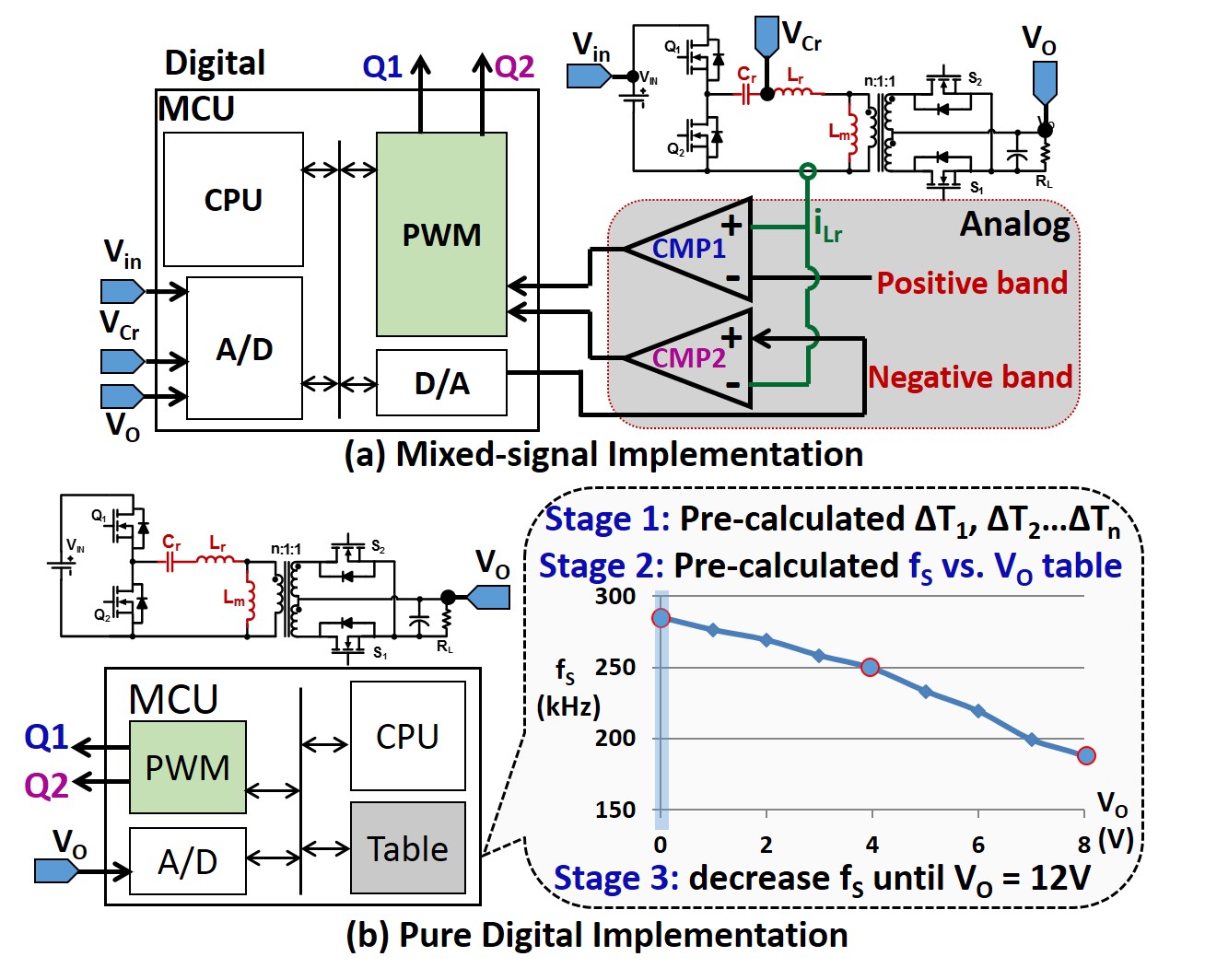
Fig. 1. Two methods of implementation for soft start-up
Two methods are proposed to solve this problem. One proposed method is a mixed-signal implementation, as shown in Fig. 1(a). In addition to the MCU, there are two comparators in the analog portion. The resonant current iLr is sensed as the positive input of Comparator 1 and the negative input of Comparator 2. The positive band is set to be IMAX as the negative input of Comparator 1. The negative band is controlled by the MCU, which is -ILM in Stage 1 and -IMAX in Stage 2. The outputs of the two comparators are directly fed back to the PWM module in the MCU. Since the propagation delay of the comparators and PMW module is negligible, the delay of the whole control loop is very small, and thus suitable for the optimal trajectory control for soft start-up. Another proposed method is digital implementation with a look-up table, as shown in Fig. 1(b), which only requires the sensing of VO. The table in Fig. 1(b) is based on the parameters of a 130kHz LLC power stage. When the input voltage reaches around 400V, the MCU will start the soft start-up process. In Stage 1, the pre-calculated ∆T1, ∆T2 ∆Tn are consequently generated. In stage 2, the MCU senses VO and controls the switching frequency based on the pre-calculated fS vs. VO table. In Stage 3, the MCU decreases the switching frequency gradually until VO = 12V.
Method 2 for soft start-up is verified on a 500kHz LLC converter. The hardware of the 500kHz LLC converter and the soft start-up waveform are shown in Fig. 2. The start-up condition is 385V input voltage and 0.178%u2126 resistive load (81% load). Results show the whole start-up process to be smooth and the maximum resonant current to be within the current limiting band.
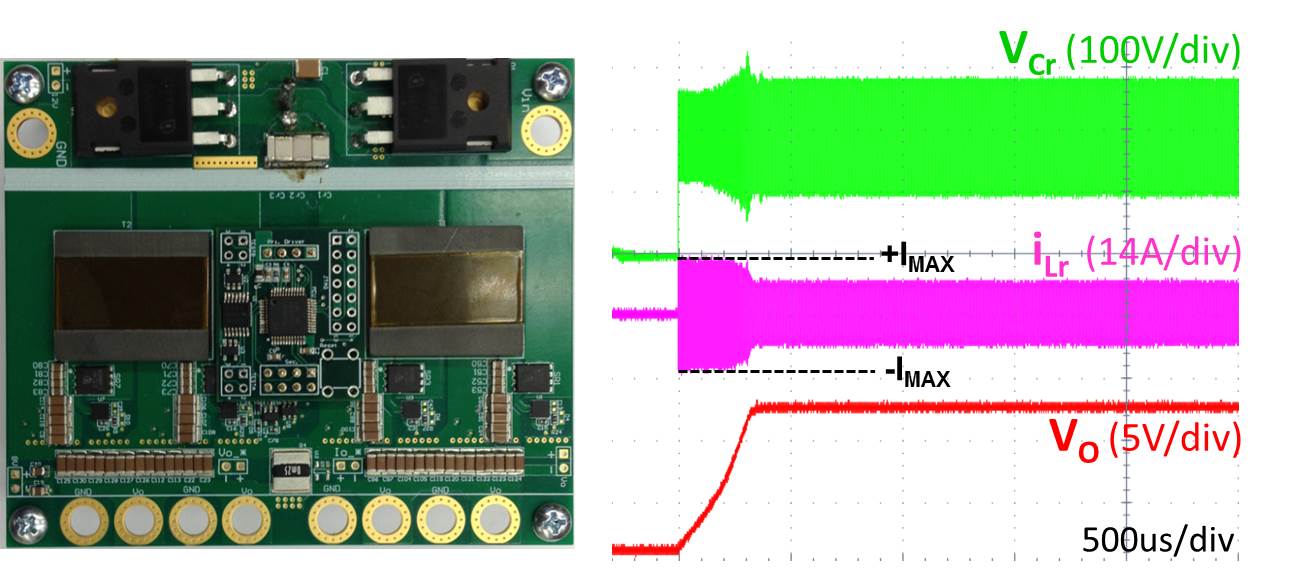
Fig. 2. 500kHz 1kW LLC converter and soft start-up waveform
