




LIBRARY
Energy-Harvesting Shock Absorbers with Riding Comfort controller on Vehicle Suspension Systems
Year: 2016
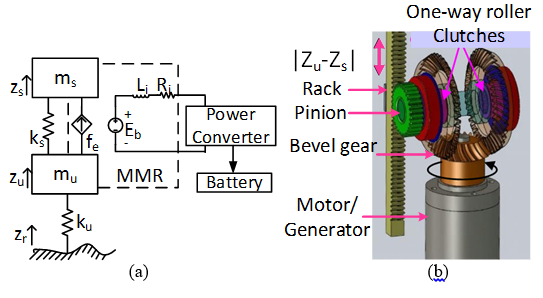
Fig. 1. Quarter car model with mechanical-motion rectifier (MMR) and power converter: (a) Mechanical diagram of suspension system with MMR; (b) Mechanical structure of MMR.
In this work, a high-efficiency and reliable energy-harvester - the MMR - is adopted as both an energy harvester and a semi-active shock absorber. To control the regenerative shock absorber, a mechanical-electrical equivalent circuit of the MMR is first introduced. Then an equivalent circuit of a quarter-car model with a skyhook controller (one of the riding comfort controllers) is developed. Next, based on these equivalent circuits, an input current/force tracking controller is proposed and implemented on full-bridge power converter. As a result, the MMR's force can be controlled under its nonlinear and discontinuous characteristics. The controller is constructed based on pulse-width modulation (PWM) control in a power converter, which also functions as an AC-DC converter transferring the energy to the battery. The controller is tested by tracking the reference force from skyhook control to improve riding comfort.
The energy harvesting capability tested in Fig. 3 shows that total harvested energy Ein from the speedbump will be around 56 joules, from which the mean harvested power Pin can be calculated as 56W. Moreover, better riding comfort can be achieved by dynamic controls based on the ICFT controller.
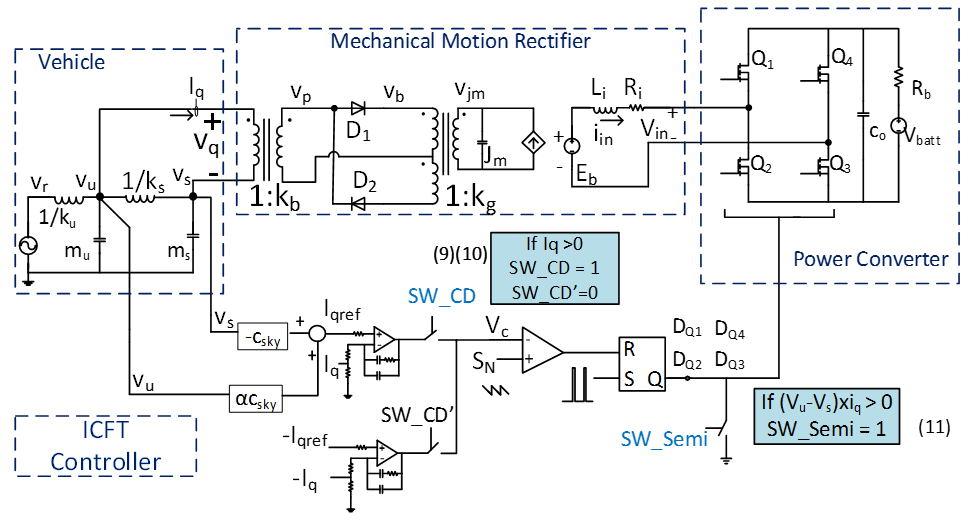
Fig. 2. Input current/force tracking (ICFT) MMR-based suspension system using control laws
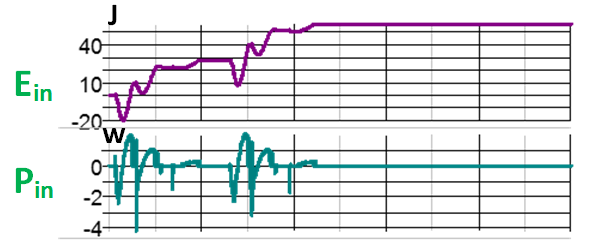
Fig. 3. Impulse response of power converter's input power (Pin) and total harvested energy (Ein).
